Contenidos
ocultar
INTRODUCCIÓN
Yo se que la mayoría de los electrónico conocemos las tarjetas de la familia Arduino, tales como; Arduino UNO, Arduino Mega, Arduino Nano, etc.
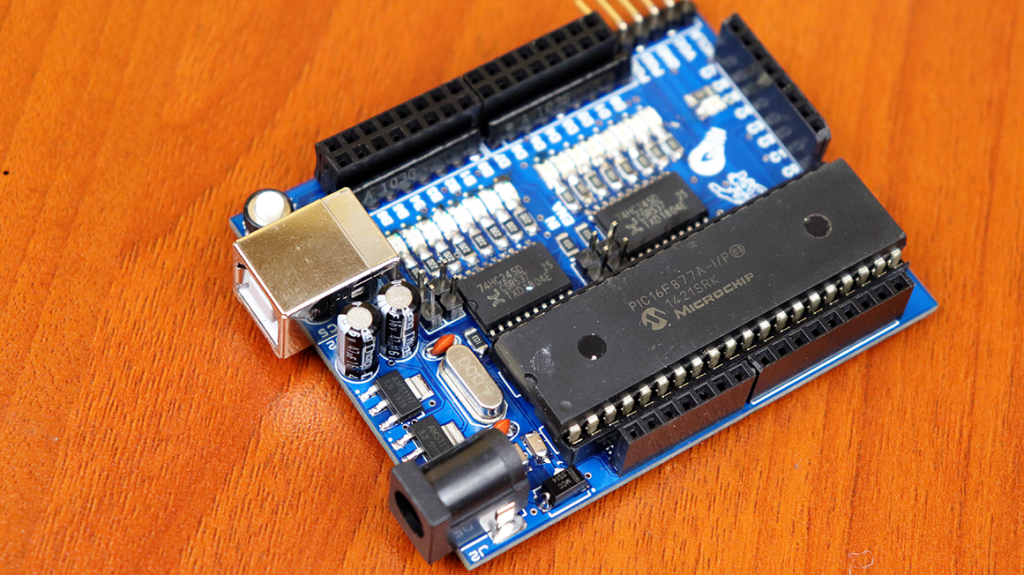
Debo admitir que estas tarjetas ya antes mencionadas, están dominando el mercado, debido a que son fáciles de usar, llegando al punto de que no se necesita tener conocimientos avanzados de electrónica para manejar estas tarjetas, prácticamente lo puede usar cualquier tipo de persona. Cabe señalar que estas tarjetas trabajan con los micro-controladores Atmel. Sin embargo, existen muchos microcontroladores que a día de hoy no tienen una tarjeta en especifico similar a los µC ATmega, por eso, en este episodio crearemos una tarjeta entrenadora para el microcontrolador pic16f877A, cuyas características serán similar a los board de la familia de Arduino.