

INTRODUCCIÓN
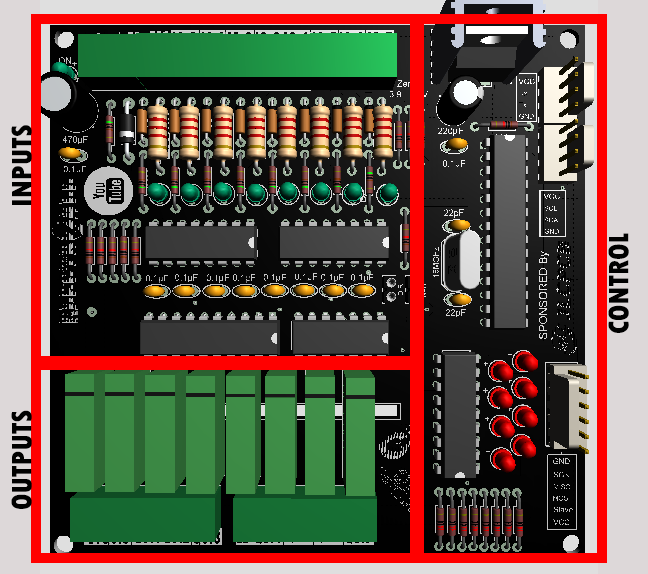
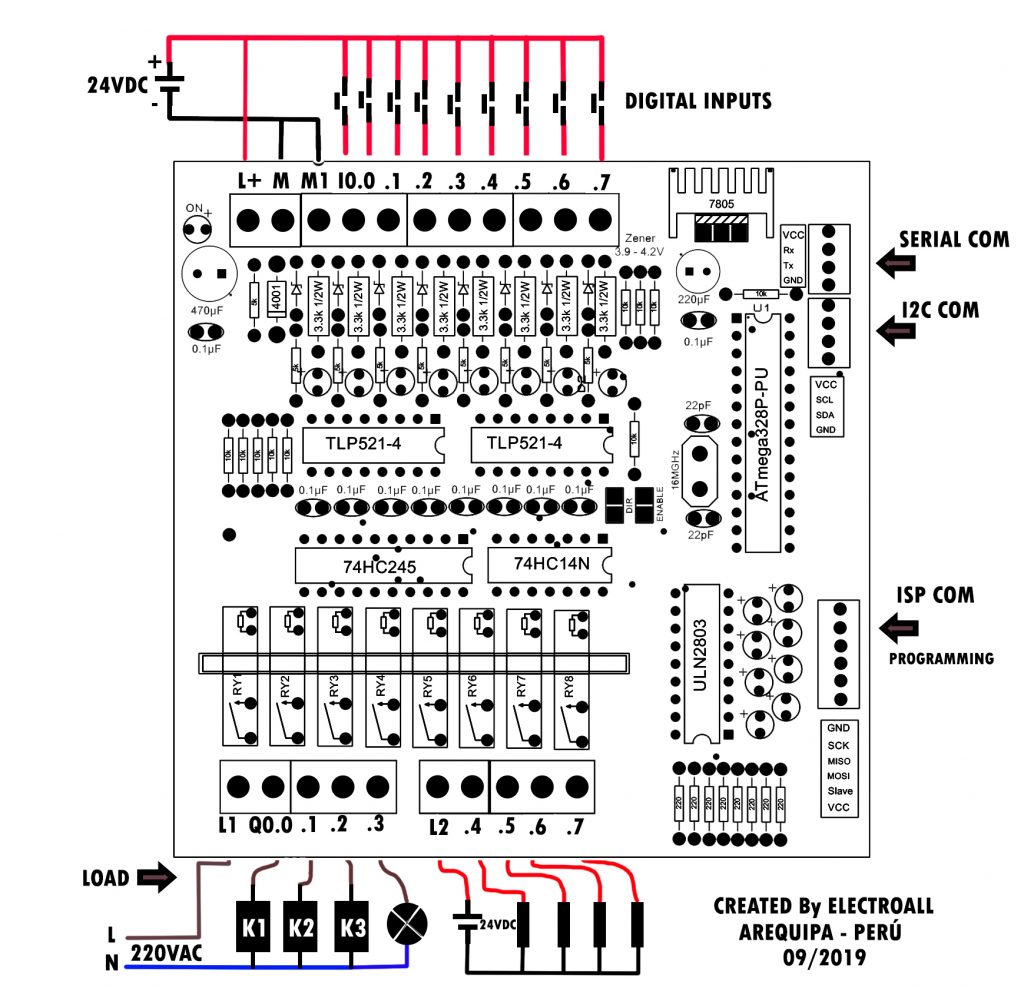
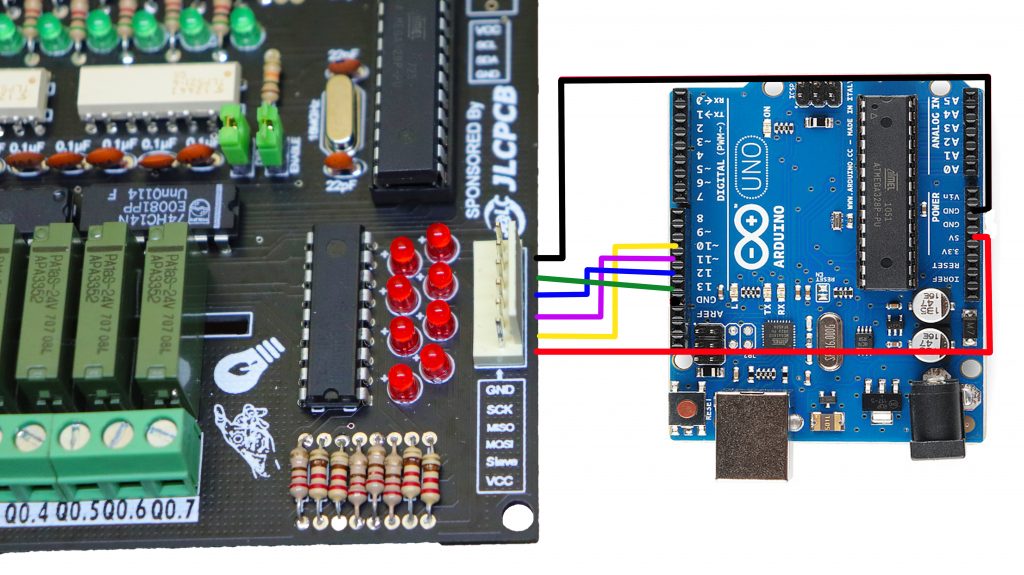
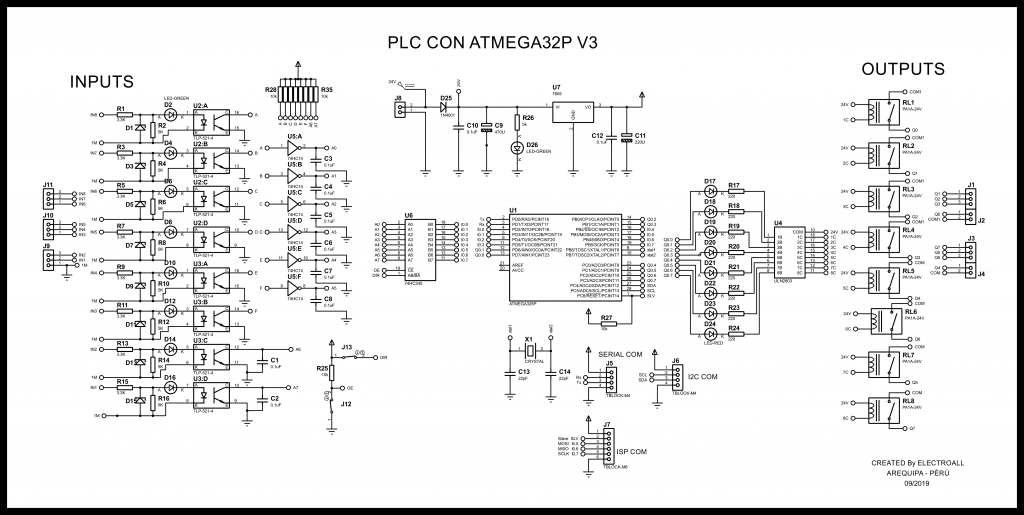
PLC con arduino (ATmega328p) V3 “DIP”, es un controlador lógico programable que fue diseñado por Electroall, cuyo circuito esta basado en el dispositivo de PLC SIEMENS S7 1200 CPU1214c con salidas de relés, por ende la tarjeta que se diseñó se alimentará con 24VDC, consecuentemente las entradas también serán de 24VDC, si bien es cierto el PLC de siemens tiene 14 entradas y 10 salidas, en este caso solo tendremos 8 entradas y 8 salidas. Para el sistema de control se está haciendo uso de un micro-controlador ATmega328p ideal para que sea programado con el IDE de arduino, cabe señalar que el sistema de control está altamente aislado de las eventos externos que vienen ser las entradas y las salidas.





3 comentarios. Dejar nuevo
Meu nome é Leandro sou Brasileiro.
Gostei muito, parabéns meu amigo, você fez um excelente trabalho.
Comprei 20 placas do CLP – V3 pelo site da JLCPCB.
Não vejo a hora de você logo terminar e disponibilizar a versão V4.
Um grande abraço, desejo-lhe sucesso.
Donde puedo conseguir uno y el precio completo
Gracias
Buenas noches, el precio del dispositivo es $60, cuénteme de es usted?
– por favor escribanos a nuestro correo: ELECTROALL.business@outlook.com