Contenidos
ocultar
INTRODUCCIÓN
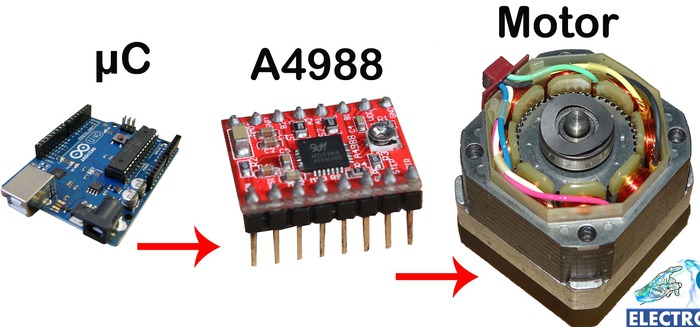
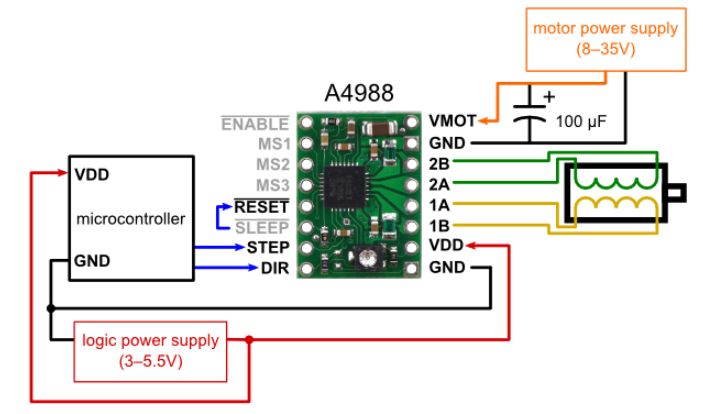
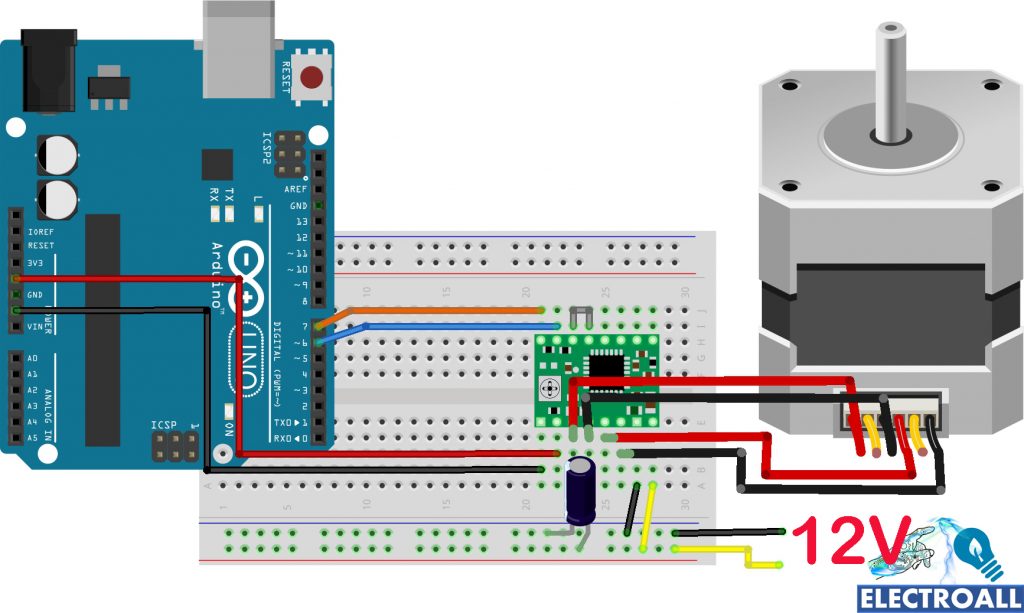
Para poder controlar motores paso a paso, primero se tiene que contar con un microcontrolador; que puede ser de las familias de Arduino, microchip (pic), estos dispositivos anteriormente mencionados nos permiten controlar los paso(pulsos) y la dirección del motor (sentido horario, anti-horario). Seguidamente se tiene que conseguir un dispositivo capaz de suministrar una corriente necesaria para el directo control propiamente de los motores paso a paso, aquí te dejo algunos dispositivos que está diseñado para el control de estos motores; Driver A4988, CI ULN2803. Finalmente se necesita un Motor paso a paso como tal, en realidad existen varios tipos de ellos, que dicho sea de paso estaremos hablando con más profundidad en las siguientes líneas.
Para poder entender mejor el funcionamiento de todo el sistema, estudiaremos cada dispositivo.