INTRODUCCIÓN
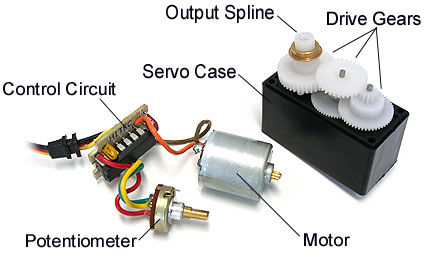
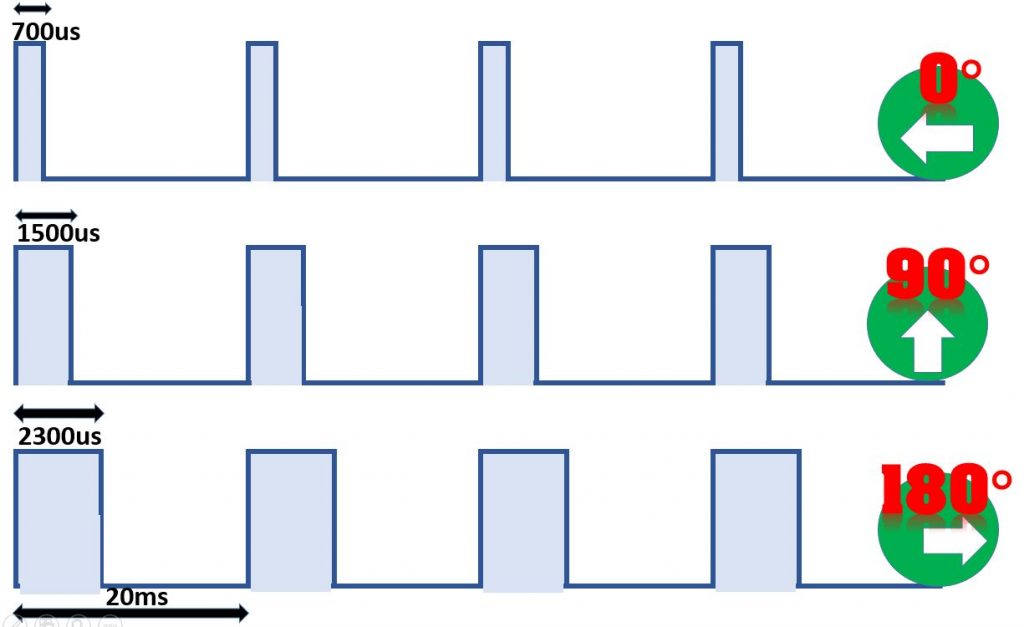
Un servomotor también llamado servo, es un motor electrónico como cualquier u otro motor DC con la diferencia que estos se pueden mover a un Angulo especifico normalmente de 0° a 180°, en la actualidad ya existen servomotores que giran a 360°, y que estos pueden ubicarse en un Angulo especifico, a través de un control que se realiza, además, tiene la capacidad de mantenerse en una posición durante el tiempo que se requiere. Así mismo estos servos podemos controlar la velocidad y posición de acuerdo a las necesidades requeridas.