INTRODUCCIÓN
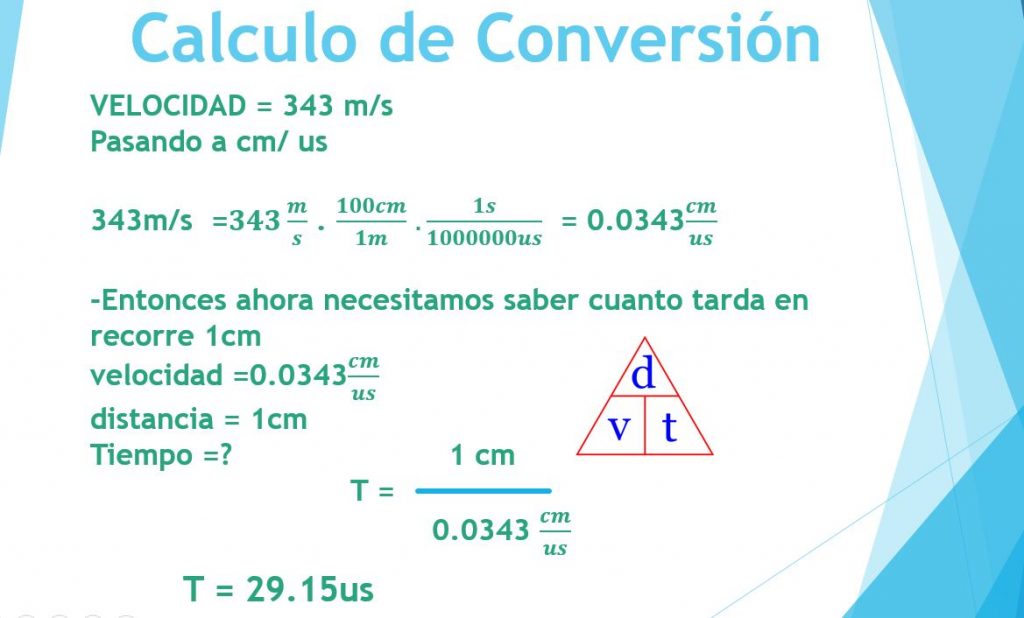
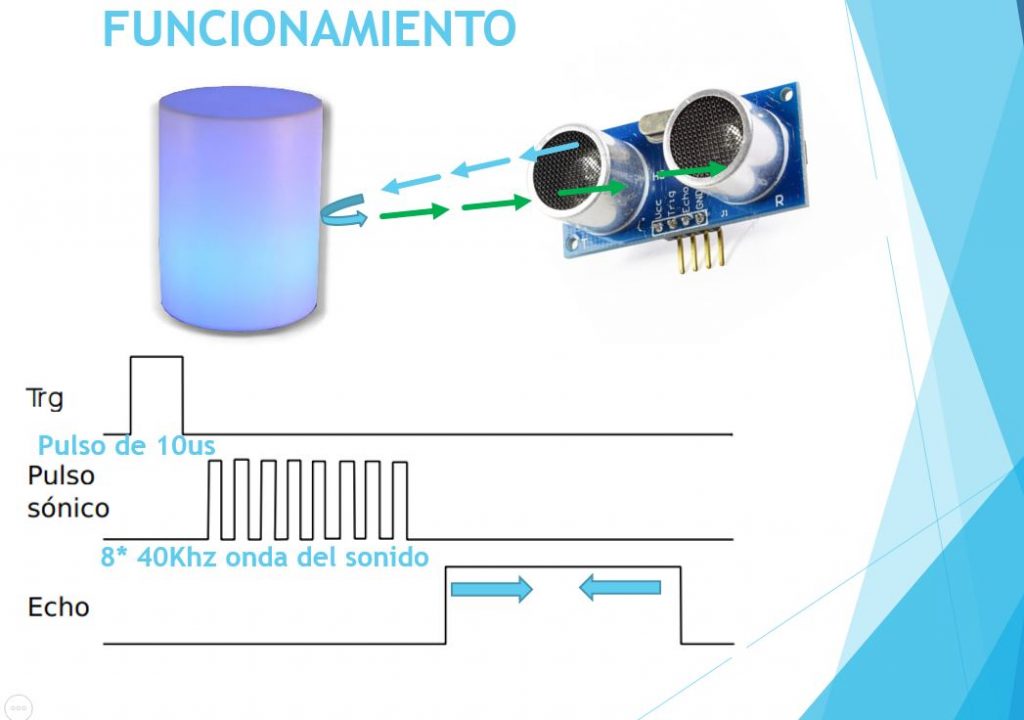
El transmisor ultrasónico emite una onda ultrasónica en una dirección, la dispersión ultrasónica en el aire volvería inmediatamente cuando encontró obstáculos en el camino. Por último, el receptor de ultrasonidos se detiene cuando recibe la onda reflejada. La velocidad de propagación por ultrasonidos es de 340 m / s en el aire, basándose en el registro del temporizador t, podemos calcular la distancia entre el obstáculo y el transmisor, a saber: s = 340t / 2.