


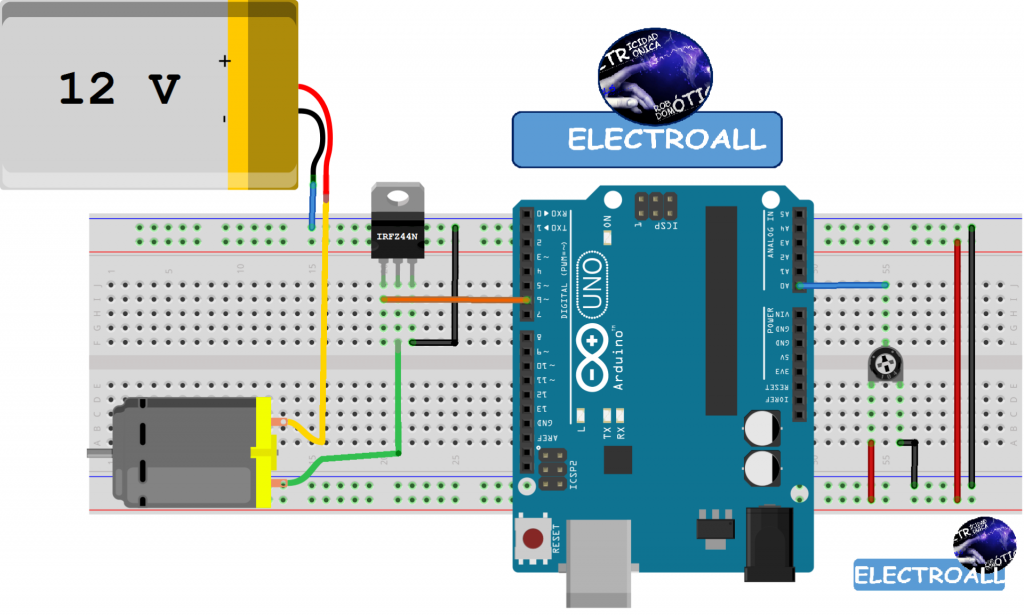
VARIACIÓN DE VELOCIDAD
MATERIALES
-
- MICROCONTROLADOR 1 UND
- MOTOR 1 UND
- RESISTENCIA 1K Ohm 1 UND
- POTENCIOMETRO 10K Ohm 1 UND
- MOSFET IRFZ44N 1 UND
/*
CREADO POR :{==[=======>>>> ELECTROALL <<<<<=======]==}
INSTAGRAM : https://www.instagram.com/carlos_j_fuentess/ ó @carlos_j_fuentess
FACEBOOK : https://web.facebook.com/ELECTROALL.ELECTRONICA/?_rdc=1&_rdr
PÁGINA WEB : https://www.electroallweb.com/
YOUTUBE : https://www.youtube.com/c/ELECTROALL
________________________________________________________
{==[=======> () <=======]==}
________________________________________________________
*/
int Motor = 6; // declaramos las variables de tipo entero
int entrada_analogica= A0;
void setup() {
pinMode (Motor, OUTPUT); // designamos los pines como pines de salida y entrada
pinMode (entrada_analogica, INPUT); // entrada
}
void loop() { //entramos a un siclo repetitivo
int valor_entrada_analogica =0; // declaramos las variables de tipo entero
int valor_salida_pwm=0; // declaramos la variable de tipo entero para la ulizacion de la modulacion por ancho de pulso
// ojo ( estos pines tienes que ser pines de (PWM)
valor_entrada_analogica = analogRead(entrada_analogica); // Guardamos la lectura analogica en la variable (valor_entrada_analógica)
valor_salida_pwm =map(valor_entrada_analogica,0, 1023,0,255); // guardamos el mapeo en la variable (valor salida)
analogWrite(Motor, valor_salida_pwm); // manifestamos en el led la lectura analogica que hemos reducido de( 0 - 255)
// donde 0 es 0 voltios y 255 viene ser 5 voltios
}
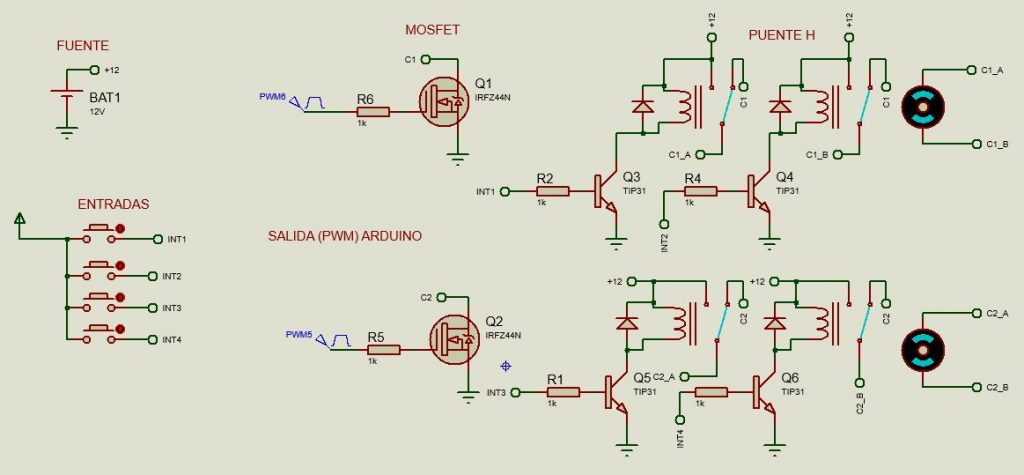
/*
CREADO POR :{==[=======>>>> ELECTROALL <<<<<=======]==}
INSTAGRAM : https://www.instagram.com/carlos_j_fuentess/ ó @carlos_j_fuentess
FACEBOOK : https://web.facebook.com/ELECTROALL.ELECTRONICA/?_rdc=1&_rdr
PÁGINA WEB : https://www.electroallweb.com/
YOUTUBE : https://www.youtube.com/c/ELECTROALL
________________________________________________________
{==[=======> (CONTROL MOTOR) <=======]==}
________________________________________________________
*/
int Motor_IZQ = 6; // declaramos las variables de tipo entero
int Motor_DER = 5;
int entrada_analogica= A0;
void setup() {
pinMode (Motor_IZQ, OUTPUT); // designamos los pines como pines de salida y entrada
pinMode (Motor_DER, OUTPUT);
pinMode (entrada_analogica, INPUT); // entrada
}
void loop() { //entramos a un siclo repetitivo
int valor_entrada_analogica =0; // declaramos las variables de tipo entero
int valor_salida_pwm=0; // declaramos la variable de tipo entero para la ulizacion de la modulacion por ancho de pulso
// ojo ( estos pines tienes que ser pines de (PWM)
valor_entrada_analogica = analogRead(entrada_analogica); // Guardamos la lectura analogica en la variable (valor_entrada_analógica)
valor_salida_pwm =map(valor_entrada_analogica,0, 1023,0,255); // guardamos el mapeo en la variable (valor salida)
analogWrite(Motor_IZQ, valor_salida_pwm); // manifestamos en el led la lectura analogica que hemos reducido de( 0 - 255)
analogWrite(Motor_DER, valor_salida_pwm);
// donde 0 es 0 voltios y 255 viene ser 5 voltios
}

