

QUÉ ES UN GESTOR DE ARRANQUE?

Antes que nada tenemos que saber que los microcontroladores de Atmel, tales como; atmega2560, atmega328p, etc. no pertenecen a la empresa Arduino. Es decir, arduino es una compañía distinta a los fabricantes de los µC de Atmel, en tal sentido, la empresa de Atmel tiene su propio software llamado Atmel studio. No obstante, este programa no es nada amigable para los principiantes o para las personas que no están netamente entrenados para la parte de programación.
Viendo estos inconvenientes Arduino nos hizo la vida más fácil creando una software bastante amigable para todas las personas en general sin importar si es electrónico o programador. Entonces, cuando se adquiere un microcontrolador nuevo (sin la tarjeta de arduino) para poder subir un programa desde IDE de Arduino primero tenemos que cargar un GESTOR DE ARRANQUE como también llamado BOOTLOADAER a través de los pines ISP (MOSI, MISO, SCK, CS).
Básicamente el Bootloader contiene un codigo .hex, donde se asigna los pines que se ve en la placa de arduino (D0, D1, D2…) y otras funciones lo cual nos facilita muchísimo a la hora de desarrollar cualquier proyecto donde se hace uso de un µC Atmega.
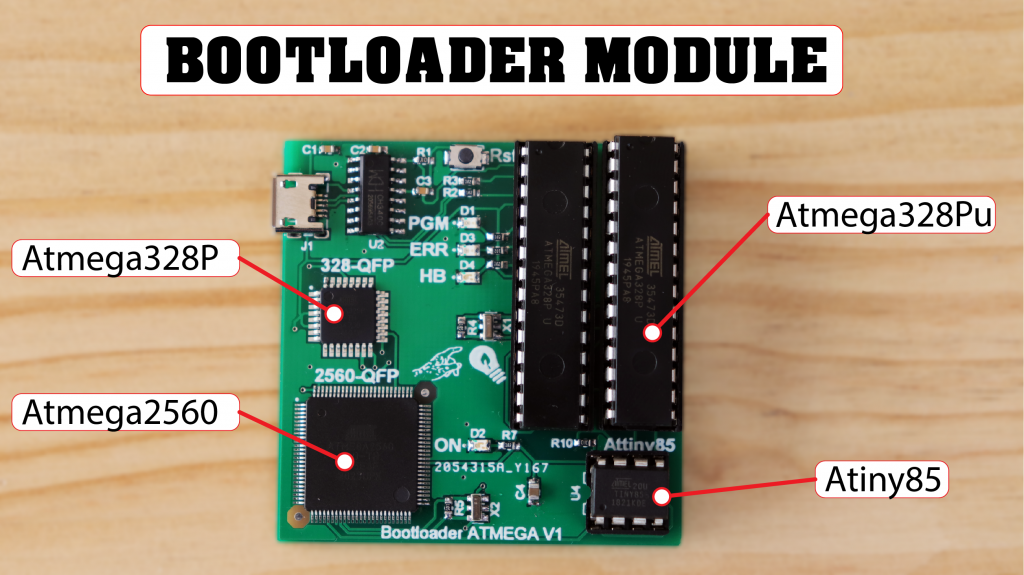
Entonces, como nosotros estamos realizando constantemente muchos proyectos con los µC de Atmega, hemos decidido crear una tarjeta pcb exclusivamente para subir gestores de arranque para Atmega2560, Atmega328p, Atmega328pu y Atiny85. Con esta tarjeta ya no realizaremos ninguna conexión cableada.
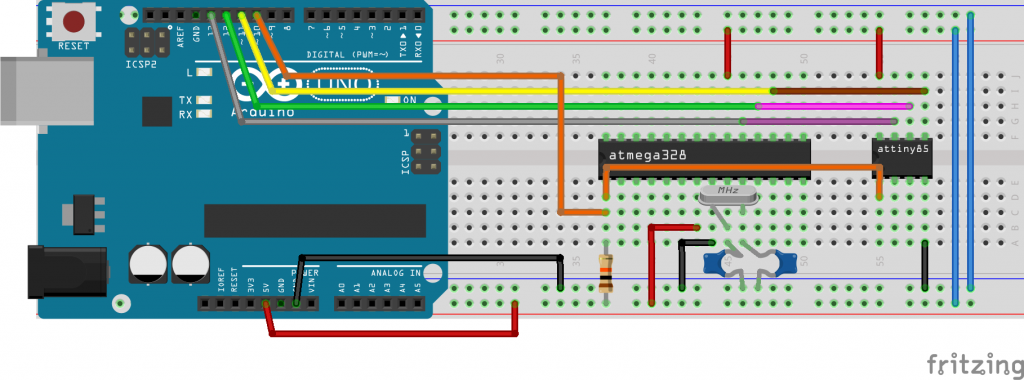
CIRCUITO BASE


MODULO GESTOR DE ARRANQUE “BOOTLOADER”
PASOS PARA SUBIR BOOTLOADER
CODIGO BOOTLOADER “arduino”
// ArduinoISP version 04m3
// Copyright (c) 2008-2011 Randall Bohn
// If you require a license, see
// http://www.opensource.org/licenses/bsd-license.php
//
// This sketch turns the Arduino into a AVRISP
// using the following arduino pins:
//
// pin name: not-mega: mega(1280 and 2560)
// slave reset: 10: 53
// MOSI: 11: 51
// MISO: 12: 50
// SCK: 13: 52
//
// Put an LED (with resistor) on the following pins:
// 9: Heartbeat - shows the programmer is running
// 8: Error - Lights up if something goes wrong (use red if that makes sense)
// 7: Programming - In communication with the slave
//
// 23 July 2011 Randall Bohn
// -Address Arduino issue 509 :: Portability of ArduinoISP
// http://code.google.com/p/arduino/issues/detail?id=509
//
// October 2010 by Randall Bohn
// - Write to EEPROM > 256 bytes
// - Better use of LEDs:
// -- Flash LED_PMODE on each flash commit
// -- Flash LED_PMODE while writing EEPROM (both give visual feedback of writing progress)
// - Light LED_ERR whenever we hit a STK_NOSYNC. Turn it off when back in sync.
// - Use pins_arduino.h (should also work on Arduino Mega)
//
// October 2009 by David A. Mellis
// - Added support for the read signature command
//
// February 2009 by Randall Bohn
// - Added support for writing to EEPROM (what took so long?)
// Windows users should consider WinAVR's avrdude instead of the
// avrdude included with Arduino software.
//
// January 2008 by Randall Bohn
// - Thanks to Amplificar for helping me with the STK500 protocol
// - The AVRISP/STK500 (mk I) protocol is used in the arduino bootloader
// - The SPI functions herein were developed for the AVR910_ARD programmer
// - More information at http://code.google.com/p/mega-isp
#include "pins_arduino.h"
#define RESET SS
#define LED_HB 9
#define LED_ERR 8
#define LED_PMODE 7
#define PROG_FLICKER true
#define HWVER 2
#define SWMAJ 1
#define SWMIN 18
// STK Definitions
#define STK_OK 0x10
#define STK_FAILED 0x11
#define STK_UNKNOWN 0x12
#define STK_INSYNC 0x14
#define STK_NOSYNC 0x15
#define CRC_EOP 0x20 //ok it is a space...
void pulse(int pin, int times);
void setup() {
Serial.begin(19200);
pinMode(LED_PMODE, OUTPUT);
pulse(LED_PMODE, 2);
pinMode(LED_ERR, OUTPUT);
pulse(LED_ERR, 2);
pinMode(LED_HB, OUTPUT);
pulse(LED_HB, 2);
}
int error=0;
int pmode=0;
// address for reading and writing, set by 'U' command
int here;
uint8_t buff[256]; // global block storage
#define beget16(addr) (*addr * 256 + *(addr+1) )
typedef struct param {
uint8_t devicecode;
uint8_t revision;
uint8_t progtype;
uint8_t parmode;
uint8_t polling;
uint8_t selftimed;
uint8_t lockbytes;
uint8_t fusebytes;
int flashpoll;
int eeprompoll;
int pagesize;
int eepromsize;
int flashsize;
}
parameter;
parameter param;
// this provides a heartbeat on pin 9, so you can tell the software is running.
uint8_t hbval=128;
int8_t hbdelta=8;
void heartbeat() {
if (hbval > 192) hbdelta = -hbdelta;
if (hbval < 32) hbdelta = -hbdelta;
hbval += hbdelta;
analogWrite(LED_HB, hbval);
delay(20);
}
void loop(void) {
// is pmode active?
if (pmode) digitalWrite(LED_PMODE, HIGH);
else digitalWrite(LED_PMODE, LOW);
// is there an error?
if (error) digitalWrite(LED_ERR, HIGH);
else digitalWrite(LED_ERR, LOW);
// light the heartbeat LED
heartbeat();
if (Serial.available()) {
avrisp();
}
}
uint8_t getch() {
while(!Serial.available());
return Serial.read();
}
void fill(int n) {
for (int x = 0; x < n; x++) {
buff[x] = getch();
}
}
#define PTIME 30
void pulse(int pin, int times) {
do {
digitalWrite(pin, HIGH);
delay(PTIME);
digitalWrite(pin, LOW);
delay(PTIME);
}
while (times--);
}
void prog_lamp(int state) {
if (PROG_FLICKER)
digitalWrite(LED_PMODE, state);
}
void spi_init() {
uint8_t x;
SPCR = 0x53;
x=SPSR;
x=SPDR;
}
void spi_wait() {
do {
}
while (!(SPSR & (1 << SPIF)));
}
uint8_t spi_send(uint8_t b) {
uint8_t reply;
SPDR=b;
spi_wait();
reply = SPDR;
return reply;
}
uint8_t spi_transaction(uint8_t a, uint8_t b, uint8_t c, uint8_t d) {
uint8_t n;
spi_send(a);
n=spi_send(b);
//if (n != a) error = -1;
n=spi_send(c);
return spi_send(d);
}
void empty_reply() {
if (CRC_EOP == getch()) {
Serial.print((char)STK_INSYNC);
Serial.print((char)STK_OK);
}
else {
error++;
Serial.print((char)STK_NOSYNC);
}
}
void breply(uint8_t b) {
if (CRC_EOP == getch()) {
Serial.print((char)STK_INSYNC);
Serial.print((char)b);
Serial.print((char)STK_OK);
}
else {
error++;
Serial.print((char)STK_NOSYNC);
}
}
void get_version(uint8_t c) {
switch(c) {
case 0x80:
breply(HWVER);
break;
case 0x81:
breply(SWMAJ);
break;
case 0x82:
breply(SWMIN);
break;
case 0x93:
breply('S'); // serial programmer
break;
default:
breply(0);
}
}
void set_parameters() {
// call this after reading paramter packet into buff[]
param.devicecode = buff[0];
param.revision = buff[1];
param.progtype = buff[2];
param.parmode = buff[3];
param.polling = buff[4];
param.selftimed = buff[5];
param.lockbytes = buff[6];
param.fusebytes = buff[7];
param.flashpoll = buff[8];
// ignore buff[9] (= buff[8])
// following are 16 bits (big endian)
param.eeprompoll = beget16(&buff[10]);
param.pagesize = beget16(&buff[12]);
param.eepromsize = beget16(&buff[14]);
// 32 bits flashsize (big endian)
param.flashsize = buff[16] * 0x01000000
+ buff[17] * 0x00010000
+ buff[18] * 0x00000100
+ buff[19];
}
void start_pmode() {
spi_init();
// following delays may not work on all targets...
pinMode(RESET, OUTPUT);
digitalWrite(RESET, HIGH);
pinMode(SCK, OUTPUT);
digitalWrite(SCK, LOW);
delay(50);
digitalWrite(RESET, LOW);
delay(50);
pinMode(MISO, INPUT);
pinMode(MOSI, OUTPUT);
spi_transaction(0xAC, 0x53, 0x00, 0x00);
pmode = 1;
}
void end_pmode() {
pinMode(MISO, INPUT);
pinMode(MOSI, INPUT);
pinMode(SCK, INPUT);
pinMode(RESET, INPUT);
pmode = 0;
}
void universal() {
int w;
uint8_t ch;
fill(4);
ch = spi_transaction(buff[0], buff[1], buff[2], buff[3]);
breply(ch);
}
void flash(uint8_t hilo, int addr, uint8_t data) {
spi_transaction(0x40+8*hilo,
addr>>8 & 0xFF,
addr & 0xFF,
data);
}
void commit(int addr) {
if (PROG_FLICKER) prog_lamp(LOW);
spi_transaction(0x4C, (addr >> 8) & 0xFF, addr & 0xFF, 0);
if (PROG_FLICKER) {
delay(PTIME);
prog_lamp(HIGH);
}
}
//#define _current_page(x) (here & 0xFFFFE0)
int current_page(int addr) {
if (param.pagesize == 32) return here & 0xFFFFFFF0;
if (param.pagesize == 64) return here & 0xFFFFFFE0;
if (param.pagesize == 128) return here & 0xFFFFFFC0;
if (param.pagesize == 256) return here & 0xFFFFFF80;
return here;
}
void write_flash(int length) {
fill(length);
if (CRC_EOP == getch()) {
Serial.print((char) STK_INSYNC);
Serial.print((char) write_flash_pages(length));
}
else {
error++;
Serial.print((char) STK_NOSYNC);
}
}
uint8_t write_flash_pages(int length) {
int x = 0;
int page = current_page(here);
while (x < length) {
if (page != current_page(here)) {
commit(page);
page = current_page(here);
}
flash(LOW, here, buff[x++]);
flash(HIGH, here, buff[x++]);
here++;
}
commit(page);
return STK_OK;
}
#define EECHUNK (32)
uint8_t write_eeprom(int length) {
// here is a word address, get the byte address
int start = here * 2;
int remaining = length;
if (length > param.eepromsize) {
error++;
return STK_FAILED;
}
while (remaining > EECHUNK) {
write_eeprom_chunk(start, EECHUNK);
start += EECHUNK;
remaining -= EECHUNK;
}
write_eeprom_chunk(start, remaining);
return STK_OK;
}
// write (length) bytes, (start) is a byte address
uint8_t write_eeprom_chunk(int start, int length) {
// this writes byte-by-byte,
// page writing may be faster (4 bytes at a time)
fill(length);
prog_lamp(LOW);
for (int x = 0; x < length; x++) {
int addr = start+x;
spi_transaction(0xC0, (addr>>8) & 0xFF, addr & 0xFF, buff[x]);
delay(45);
}
prog_lamp(HIGH);
return STK_OK;
}
void program_page() {
char result = (char) STK_FAILED;
int length = 256 * getch();
length += getch();
char memtype = getch();
// flash memory @here, (length) bytes
if (memtype == 'F') {
write_flash(length);
return;
}
if (memtype == 'E') {
result = (char)write_eeprom(length);
if (CRC_EOP == getch()) {
Serial.print((char) STK_INSYNC);
Serial.print(result);
}
else {
error++;
Serial.print((char) STK_NOSYNC);
}
return;
}
Serial.print((char)STK_FAILED);
return;
}
uint8_t flash_read(uint8_t hilo, int addr) {
return spi_transaction(0x20 + hilo * 8,
(addr >> 8) & 0xFF,
addr & 0xFF,
0);
}
char flash_read_page(int length) {
for (int x = 0; x < length; x+=2) {
uint8_t low = flash_read(LOW, here);
Serial.print((char) low);
uint8_t high = flash_read(HIGH, here);
Serial.print((char) high);
here++;
}
return STK_OK;
}
char eeprom_read_page(int length) {
// here again we have a word address
int start = here * 2;
for (int x = 0; x < length; x++) {
int addr = start + x;
uint8_t ee = spi_transaction(0xA0, (addr >> 8) & 0xFF, addr & 0xFF, 0xFF);
Serial.print((char) ee);
}
return STK_OK;
}
void read_page() {
char result = (char)STK_FAILED;
int length = 256 * getch();
length += getch();
char memtype = getch();
if (CRC_EOP != getch()) {
error++;
Serial.print((char) STK_NOSYNC);
return;
}
Serial.print((char) STK_INSYNC);
if (memtype == 'F') result = flash_read_page(length);
if (memtype == 'E') result = eeprom_read_page(length);
Serial.print(result);
return;
}
void read_signature() {
if (CRC_EOP != getch()) {
error++;
Serial.print((char) STK_NOSYNC);
return;
}
Serial.print((char) STK_INSYNC);
uint8_t high = spi_transaction(0x30, 0x00, 0x00, 0x00);
Serial.print((char) high);
uint8_t middle = spi_transaction(0x30, 0x00, 0x01, 0x00);
Serial.print((char) middle);
uint8_t low = spi_transaction(0x30, 0x00, 0x02, 0x00);
Serial.print((char) low);
Serial.print((char) STK_OK);
}
//////////////////////////////////////////
//////////////////////////////////////////
////////////////////////////////////
////////////////////////////////////
int avrisp() {
uint8_t data, low, high;
uint8_t ch = getch();
switch (ch) {
case '0': // signon
error = 0;
empty_reply();
break;
case '1':
if (getch() == CRC_EOP) {
Serial.print((char) STK_INSYNC);
Serial.print("AVR ISP");
Serial.print((char) STK_OK);
}
break;
case 'A':
get_version(getch());
break;
case 'B':
fill(20);
set_parameters();
empty_reply();
break;
case 'E': // extended parameters - ignore for now
fill(5);
empty_reply();
break;
case 'P':
start_pmode();
empty_reply();
break;
case 'U': // set address (word)
here = getch();
here += 256 * getch();
empty_reply();
break;
case 0x60: //STK_PROG_FLASH
low = getch();
high = getch();
empty_reply();
break;
case 0x61: //STK_PROG_DATA
data = getch();
empty_reply();
break;
case 0x64: //STK_PROG_PAGE
program_page();
break;
case 0x74: //STK_READ_PAGE 't'
read_page();
break;
case 'V': //0x56
universal();
break;
case 'Q': //0x51
error=0;
end_pmode();
empty_reply();
break;
case 0x75: //STK_READ_SIGN 'u'
read_signature();
break;
// expecting a command, not CRC_EOP
// this is how we can get back in sync
case CRC_EOP:
error++;
Serial.print((char) STK_NOSYNC);
break;
// anything else we will return STK_UNKNOWN
default:
error++;
if (CRC_EOP == getch())
Serial.print((char)STK_UNKNOWN);
else
Serial.print((char)STK_NOSYNC);
}
}
1 comentario. Dejar nuevo
Muy buen trabajo Excelente
Porfavor nos podría dar el diagrama completo del Arduino uno usando el Ch340 y el Atmega328 Dip. El de 28 pines. Sería lo más grande q Ud. haría para Ayudarnos a ensamblar el nuestro. Gracias.