
Aquí tenemos una maqueta de ascensor hecha con Arduino Nano que incluye una pantalla LCD y un teclado matricial para realizar las configuraciones y prácticas necesarias. Como pueden ver, subimos al segundo nivel… y al tercer nivel…
Esta maqueta se diseñó con la finalidad de hacer prácticas y experimentar con el funcionamiento de un ascensor real. Dado que la tarjeta de control utiliza un microcontrolador Arduino Nano, a través de este puerto USB tipo C podemos cargar el programa y al mismo tiempo nos sirve de alimentación. Prácticamente es como tener un circuito en un protoboard con una tarjeta Arduino Nano, con la diferencia de que todo está integrado en esta tarjeta compacta.
¿Te gustaría saber cómo se desarrolló este proyecto desde cero? Desde el diseño del esquemático electrónico, el diseño de la tarjeta PCB hasta el armado de la estructura completa. Pues no te despegues de este artículo.
DATOS TECNICOS

- Tensión de alimentación……………………….…………12 Ó 24VDC
- Corriente de alimentación………………….……………90mA
- Entadas digitales 12-24VDC……………………….……2
- Salidas digitales 12-24VDC ……………………………9
- Entorno de programación………………………..………..Arduino IDE
- Vinculación con cualquier PLC……………………………… Sí
- Condiciones ambientales min……………………….….-40°
- Condiciones ambientales max…………………..……….150°
- Dimensiones……………………………………………………….80x90mm
- Empotrable………………………………….……………………Sí
- Programación directa (PC-Tarjeta electrónica)…………Sí
- I2C comunicación…………………………………………………………..Sí
- Comunicacion Serial………………………………………………………Sí
- Teclado matricial……………………………………………………………..Sí
- Pantalla LCD i2c……………………………………………………………….Sí
- Buzzer………………………………………………………………………………..Sí


LISTA DE MATERIALES
| Quantity | Comment | Designator | Footprint | Value | Manufacturer Part | Manufacturer | Supplier Part |
| 1 | 3kHz | BUZZER1 | BUZ-TH_BD9.0-P5.00-D0.6-FD | 3kHz | HNB09A03 | 华能 | C96102 |
| 14 | 100nF | C1,C2,C3,C4,C5,C6,C7, C8,C9,C10,C11,C13,C14,C15 |
C0603 | 100nF | CC0603KRX7R9BB104 | YAGEO(国巨) | C14663 |
| 1 | 2.2uF | C12 | CAP-SMD_BD4.0-L4.3-W4.3-LS5.3-FD | 2.2uF | RVT1C2R2M0405 | ROQANG(容强) | C72492 |
| 1 | 470uF | C16 | CAP-SMD_BD10.0-L10.3-W10.3-LS11.3-FD | 470uF | VT1V471M1010 | ROQANG(容强) | C310845 |
| 1 | 1uF | C17 | C1206 | 1uF | CL31B105KBHNNNE | SAMSUNG(三星) | C1848 |
| 1 | 220uF | C18 | CAP-SMD_BD6.3-L6.6-W6.6-LS7.2-R-RD | 220uF | RVE1C221M0607 | ROQANG(容强) | C99836 |
| 1 | 2.0-2*8P直简牛 | CN1 | IDC-TH_16P-P2.00-V-R2-C8-S2.00 | 2.0-2*8P直简牛 | BOOMELE(博穆精密) | C56602 | |
| 1 | ZX-XH2.54-4PZZ | CN2 | CONN-TH_4P-P2.50_4PIN | ZX-XH2.54-4PZZ | Megastar(兆星) | C7429634 | |
| 1 | 1N4148W | D1 | SOD-123F_L2.7-W1.6-LS3.8-RD | 1N4148W | ST(先科) | C81598 | |
| 4 | SS210 | D2,D3,D4,D5 | SMA_L4.3-W2.6-LS5.2-RD | SS210 | MDD | C14996 | |
| 1 | 2.54-1x6P直针 | H1 | HDR-TH_6P-P2.54-V-M-1 | 2.54-1x6P直针 | BOOMELE(博穆精密) | C37208 | |
| 2 | PZ254V-11-04P | H2,H3 | HDR-TH_4P-P2.54-V-M | PZ254V-11-04P | XFCN(兴飞) | C2691448 | |
| 3 | 2.54-1*3P针 | H4,H5,H6 | HDR-TH_3P-P2.54-V-M-1 | 2.54-1*3P针 | BOOMELE(博穆精密) | C49257 | |
| 1 | 68uH | L1 | IND-SMD_L7.1-W6.6-1 | 68uH | PSPMAA0605H-680M-IGF | PROD(谱罗德) | C2983094 |
| 9 | 19-217/GHC-YR1S2/3T | LED1,LED2,LED3,LED4 ,LED5,LED6,LED7,LED8,LED9 |
LED0603-RD | 19-217/GHC-YR1S2/3T | EVERLIGHT(亿光) | C72043 | |
| 2 | WJ128V-5.0-2P | P1,P5 | CONN-TH_2P-P5.00_WJ128V-5.0-2P | WJ128V-5.0-2P | KANGNEX(康奈克斯电气) | C8269 | |
| 3 | WJ128V-5.0-3P | P2,P3,P4 | CONN-TH_3P-P5.00_WJ128V-5.0-3P | WJ128V-5.0-3P | KANGNEX(康奈克斯电气) | C8270 | |
| 9 | AO3401A | Q1,Q2,Q4,Q5,Q6,Q7, Q8,Q9,Q10 |
SOT-23_L2.9-W1.3-P1.90-LS2.4-BR | AO3401A | AOS | C15127 | |
| 1 | MMBT3904 | Q3 | SOT-23-3_L2.9-W1.3-P1.90-LS2.4-BR | MMBT3904 | CJ(江苏长电/长晶) | C20526 | |
| 12 | 1kΩ | R1,R2,R3,R4,R5,R6,R7, R8,R9,R26,R39,R40 |
R0603 | 1kΩ | 0603WAF1001T5E | UNI-ROYAL(厚声) | C21190 |
| 12 | 10kΩ | R10,R11,R12,R13,R14 ,R15,R16,R17,R18,R30,R35,R45 |
R0603 | 10kΩ | 0603WAF1002T5E | UNI-ROYAL(厚声) | C25804 |
| 1 | 1MΩ | R19 | R0603 | 1MΩ | 0603WAF1004T5E | UNI-ROYAL(厚声) | C22935 |
| 11 | 10kΩ | R20,R23,R27,R31,R34, R36,R41,R44,R46,R49,R52 |
R0805 | 10kΩ | 0805W8F1002T5E | UNI-ROYAL(厚声) | C17414 |
| 18 | 470Ω | R21,R22,R24,R25,R28,R29, R32,R33,R37,R38,R42,R43, R47,R48,R50,R51,R53,R54 |
R0603 | 470Ω | 0603WAF4700T5E | UNI-ROYAL(厚声) | C23179 |
| 1 | TS-1187A-B-A-B | SW1 | SW-SMD_4P-L5.1-W5.1-P3.70-LS6.5-TL-2 | TS-1187A-B-A-B | XKB Connectivity(中国星坤) | C318884 | |
| 1 | MSS22D18G2 | SW2 | SW-TH_MSS22D18GX | MSS22D18G2 | SHOU HAN(首韩) | C431542 | |
| 2 | Test-Point | TP1,TP2 | Test-Point-0.5mm | ||||
| 1 | ATMEGA328P-AU | U1 | TQFP-32_L7.0-W7.0-P0.80-LS9.0-BL | ATMEGA328P-AU | MICROCHIP(美国微芯) | C14877 | |
| 11 | EL357N(C)(TA)-G | U2,U3,U5,U6,U7, U8,U9,U10,U12,U13,U15 |
OPTO-SMD-4_L4.4-W4.1-P2.54-LS7.0-TL | EL357N(C)(TA)-G | EVERLIGHT(亿光) | C42379244 | |
| 1 | BDR6121H | U4 | SOP-8_L4.9-W3.8-P1.27-LS6.0-BL | BDR6121H | 巴丁微 | C3007875 | |
| 1 | CH340C | U11 | SOP-16_L10.0-W3.9-P1.27-LS6.0-BL | CH340C | WCH(南京沁恒) | C84681 | |
| 1 | XL1509-5.0E1 | U14 | SOIC-8_L5.0-W4.0-P1.27-LS6.0-BL | XL1509-5.0E1 | XLSEMI(芯龙) | C61063 | |
| 1 | USB-TYPE-C-018 | USB1 | USB-C_SMD-TYPE-C-31-M-12 | USB-TYPE-C-018 | DEALON(德艺隆) | C2927038 | |
| 1 | 16MHz | X1 | OSC-SMD_3P-L3.2-W1.3-P0.95-L | 16MHz | CSTCE16M0V53-R0 | muRata(村田) | C32180 |
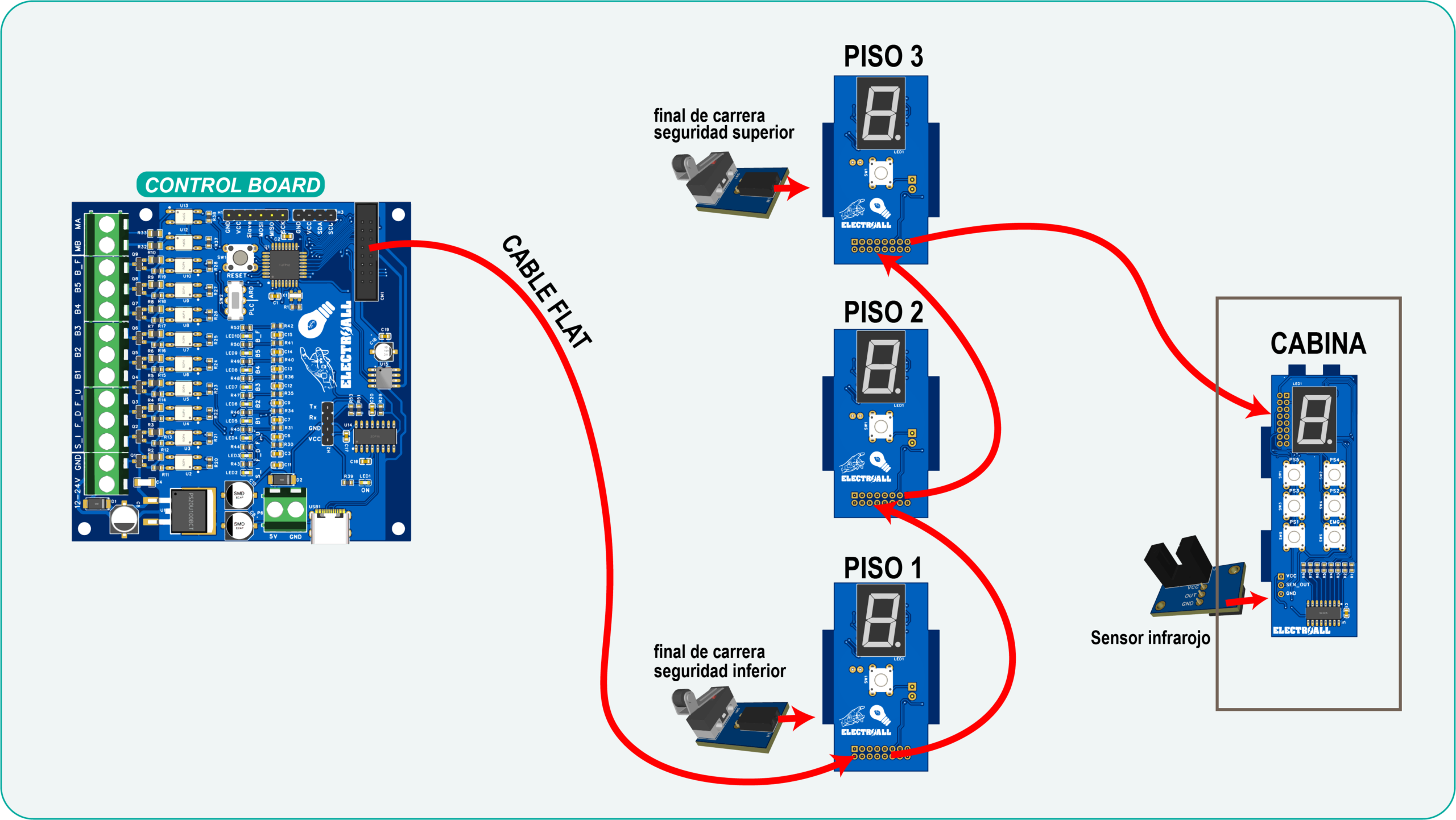
CONEXION DE TODAS LAS TARJETAS
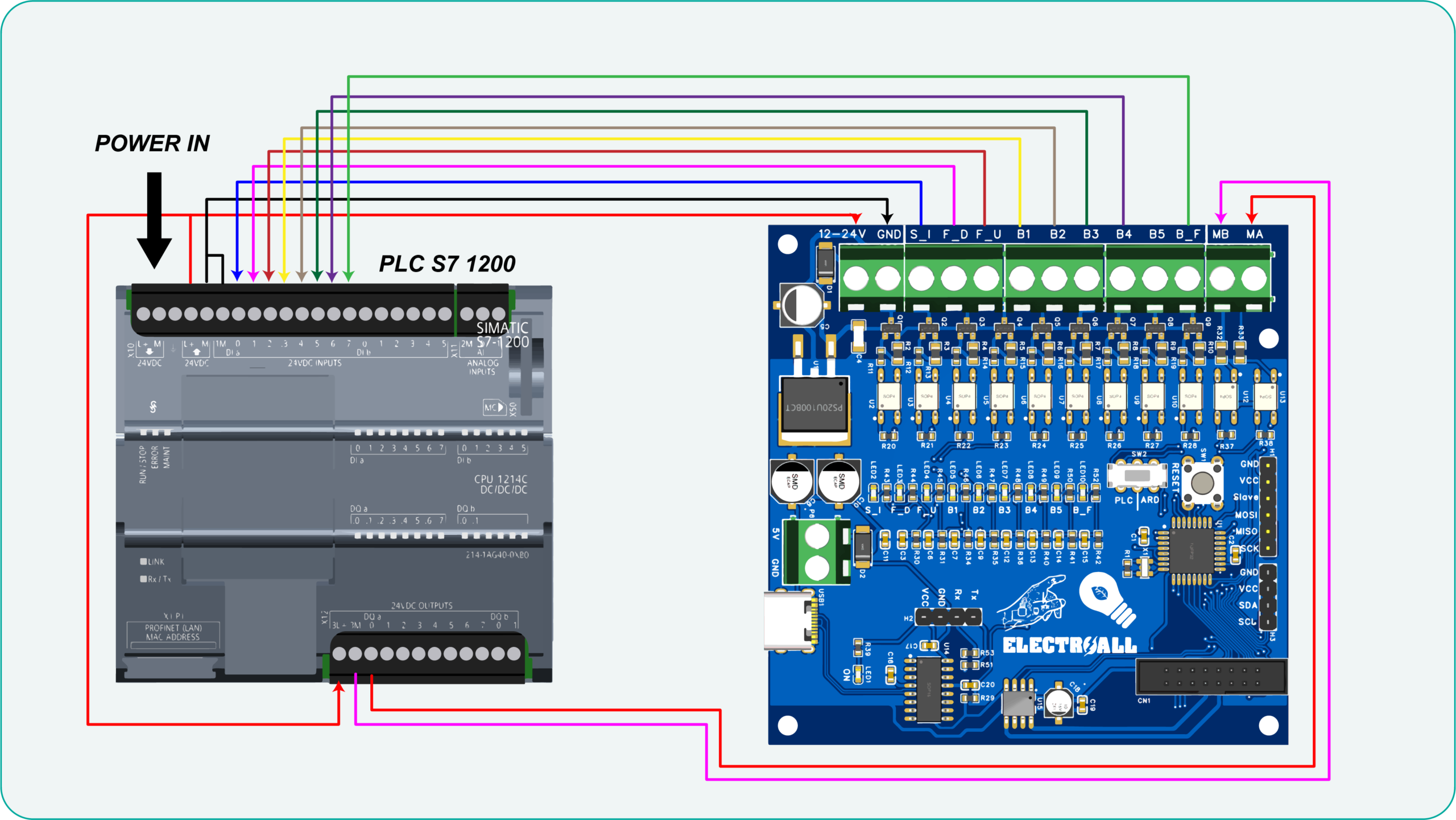
CONEXIONADO EXTERNO CON PLC

CODIGO
#include <Wire.h>
#include <LiquidCrystal_I2C.h>
#include <Keypad_I2C.h>
LiquidCrystal_I2C lcd(0x27, 16, 2); // Dirección I2C del LCD
// Configuración del teclado con Keypad_I2C
const byte ROWS = 4; // Número de filas
const byte COLS = 4; // Número de columnas
char keys[ROWS][COLS] = {
{ '1', '2', '3', 'A' },
{ '4', '5', '6', 'B' },
{ '7', '8', '9', 'C' },
{ '*', '0', '#', 'D' }
};
byte rowPins[ROWS] = { 3, 2, 1, 0 }; // Filas conectadas a P0-P3 del PCF8574
byte colPins[COLS] = { 7, 6, 5, 4 }; // Columnas conectadas a P4-P7 del PCF8574
Keypad_I2C keypad(makeKeymap(keys), rowPins, colPins, ROWS, COLS, 0x20); // Dirección del PCF8574
int buzzerPin = 16;
const int tonoTecla = 1000; // Frecuencia en Hz para pulsación normal
const int duracionCorta = 50; // Duración en ms para tecla normal
int clockpin = 11; //Cuando ay que leer los bit SH
int data = 12; //Envio datos DS
int latch = 13; //indica pin de salida en el chip ST
int S_I_cont = 0; //
int contador = 0;
int valor = 0;
int valor1 = 0;
int B_EM = 0;
const int NUM[] = {
// display katodo comun
63, //Numero 0 en binario es : 00111111
6, //Numero 1 en binario es : 00000110
91, //Numero 2 en binario es : 01011011
79, //Numero 3 en binario es : 01001111
102, //Numero 4 en binario es : 01100110
109, //Numero 5 en binario es : 01101101
125, //Numero 6 en binario es : 01111101
7, //Numero 7 en binario es : 00000111
127, //Numero 8 en binario es : 01111111
111, //Numero 9 en binario es : 01101111
63, //Numero 0 en binario es : 00111111
28, //NUM 0 en binario es : 00011100 puerta bajando, para posicion inicial
};
unsigned long time;
float tiempo = 500;
unsigned long t = 0;
//physical inputs
const int in1 = 2; // sensor de piso con interruptor externo
const int in2 = 3; // final de carrera inferior
const int in3 = 4; // final de carrera superior
const int in4 = 14; // boton 1
const int in5 = 15; // boton 2
const int in6 = 7; // boton 3
const int in7 = 8; // boton 4
const int in8 = 9; // boton 5
const int in9 = 10; // boton de emergencia
// physical outputs
const int m_up = 5; //motor subir
const int m_down = 6; // motor bajar
const int buzzer = 16; // BUZER
// Memories
//ETAPA
boolean e0, e1, e2, e3, e4, e5, e6 = false;
//TRANSITION
boolean t01, t02, t03, t04, t05, t06, t10, t20, t30, t40, t50, t60 = false;
int last_S_I = 0;
bool acceso = false;
void setup() {
lcd.init(); // Inicializa LCD
lcd.backlight(); // Habilita retroiluminación
lcd.setCursor(0, 0);
lcd.print("buscando posicion:");
lcd.setCursor(0, 1);
lcd.print(" INICIAL:");
// Inicializar teclado I2C
Wire.begin();
keypad.begin(makeKeymap(keys));
//salidas para display
pinMode(latch, OUTPUT);
pinMode(clockpin, OUTPUT);
pinMode(data, OUTPUT);
//sensores infrarrojo
pinMode(in1, INPUT);
//final de carrera de seguridad
pinMode(in2, INPUT);
pinMode(in3, INPUT);
//pusadores de llamada
pinMode(in4, INPUT); //1er piso
pinMode(in5, INPUT); //2do piso
pinMode(in6, INPUT); //3to piso
pinMode(in7, INPUT); //4to piso
pinMode(in8, INPUT); //5to piso
pinMode(in9, INPUT); // Pulsador de emergencia
//salidas motor
pinMode(m_up, OUTPUT);
pinMode(m_down, OUTPUT);
pinMode(buzzer, OUTPUT);
//delay(2000);
while (!digitalRead(in2) == HIGH) {
digitalWrite(m_down, 1);
digitalWrite(latch, LOW);
shiftOut(data, clockpin, MSBFIRST, NUM[11]); // lee el arreglo y pasa cada NUM a lectura binaria
digitalWrite(latch, HIGH);
}
//delay(500);
while (!digitalRead(in1) == HIGH) {
digitalWrite(m_down, 0);
digitalWrite(m_up, 1);
}
if (digitalRead(in1) == true) {
digitalWrite(m_up, 0);
S_I_cont = 1;
lcd.clear();
}
cont();
digitalWrite(m_down, 0);
digitalWrite(buzzer, 0);
}
void loop() {
//Inputs
int S_I = digitalRead(in1);
int F_D = digitalRead(in2);
int F_U = digitalRead(in3);
int b1 = digitalRead(in4);
int b2 = digitalRead(in5);
int b3 = digitalRead(in6);
int s2 = digitalRead(in7);
int s3 = digitalRead(in8);
int B_E = digitalRead(in9); //Boton de energencia
if (F_D || F_U || b1 || b2 || b3 || s2 || s3 || B_E) {
sonidoTecla();
}
if (B_E != valor) {
if (B_E == LOW) {
valor1++;
delay(200);
}
}
valor = B_E;
if (valor1 == 1) {
B_EM = true;
}
if (valor1 == 2) {
B_EM = false;
valor1 = 0;
}
if (e1 || e2 || e3 || e4 || e5 || e6 == true) {
time = millis();
if (time - t > tiempo) {
t = time;
contador++;
//Serial.println(contador);
}
}
if (S_I != last_S_I) {
if (S_I == LOW) {
if (contador > 3) {
if (e1 || e2 || e3 == true) {
if (S_I_cont < 3) {
S_I_cont++;
contador = 0;
sonidoTecla();
}
}
if (e4 || e5 || e6 == true) {
if (S_I_cont > 1) {
S_I_cont--;
contador = 0;
sonidoTecla();
}
}
}
}
}
last_S_I = S_I;
//INICIALIZACION***************************
if ((!e1 && !e2 && !e3 && !e4 && !e5 && !e6) == true) {
e0 = true;
}
//TRANSITION*********************************
//from 1 to 2 floor
if (e0 == true && S_I_cont == 1 && b2 == true) {
t01 = true;
t10 = false;
}
if (e1 && S_I_cont == 2) {
t10 = true;
t01 = false;
}
//from 1 to 3 floor
if (e0 && S_I_cont == 1 && b3 == true) {
t02 = true;
t20 = false;
}
if (e2 && S_I_cont == 3) {
acceso = false;
t20 = true;
t02 = false;
}
//from 2 to 3 floor
if (e0 && S_I_cont == 2 && b3 == true) {
t03 = true;
t30 = false;
}
if (e3 && S_I_cont == 3) {
t30 = true;
t03 = false;
}
//from 3 to 2 floor
if (e0 && S_I_cont == 3 && b2 == true) {
t04 = true;
t40 = false;
}
if (e4 && S_I_cont == 2) {
t40 = true;
t04 = false;
}
//from 3 to 1 floor
if (e0 && S_I_cont == 3 && b1 == true) {
t05 = true;
t50 = false;
}
if (e5 && S_I_cont == 1) {
t50 = true;
t05 = false;
}
//from 2 to 1 floor
if (e0 && S_I_cont == 2 && b1 == true) {
t06 = true;
t60 = false;
}
if (e6 && S_I_cont == 1) {
t60 = true;
t06 = false;
}
//ETAPA**************************************
if (e0 && t01 == true) {
e0 = false;
e1 = true;
}
if (e1 && t10 == true) {
e1 = false;
e0 = true;
}
if (e0 && t02 == true) {
e0 = false;
e2 = true;
}
if (e2 && t20 == true) {
e2 = false;
e0 = true;
}
if (e0 && t03 == true) {
e0 = false;
e3 = true;
}
if (e3 && t30 == true) {
e3 = false;
e0 = true;
}
if (e0 && t04 == true) {
e0 = false;
e4 = true;
}
if (e4 && t40 == true) {
e4 = false;
e0 = true;
}
if (e0 && t05 == true) {
e0 = false;
e5 = true;
}
if (e5 && t50 == true) {
e5 = false;
e0 = true;
}
if (e0 && t06 == true) {
e0 = false;
e6 = true;
}
if (e6 && t60 == true) {
e6 = false;
e0 = true;
}
//ACTUADORES*********************************
// Motor subiendo
if ((e1 || e2 || e3 == true) && (!F_D && !F_U && !B_EM == true)) {
digitalWrite(m_up, HIGH);
digitalWrite(m_down, LOW);
lcd.setCursor(0, 0);
lcd.print(" CABINA ");
lcd.setCursor(0, 1);
lcd.print(" SUBIENDO ");
cont();
}
//Reposo
if (e0 || F_D || F_U || B_EM == true) {
digitalWrite(m_up, LOW);
digitalWrite(m_down, LOW);
lcd.setCursor(0, 0);
lcd.print(" DETENIDO....");
lcd.setCursor(0, 1);
lcd.print(" STOP....");
cont();
}
//motor bajando
if ((e4 || e5 || e6 == true) && (!F_D && !F_U && !B_EM == true)) {
lcd.setCursor(0, 0);
lcd.print(" CABINA ");
lcd.setCursor(0, 1);
lcd.print(" BAJANDO. ");
digitalWrite(m_up, LOW);
digitalWrite(m_down, HIGH);
cont();
}
}
void cont() {
digitalWrite(latch, LOW);
shiftOut(data, clockpin, MSBFIRST, NUM[S_I_cont]); // lee el arreglo y pasa cada NUM a lectura binaria
digitalWrite(latch, HIGH);
}
void sonidoTecla() {
tone(buzzerPin, tonoTecla, duracionCorta);
delay(duracionCorta); // Pequeña pausa para evitar solapamientos
}