Contenidos
ocultar
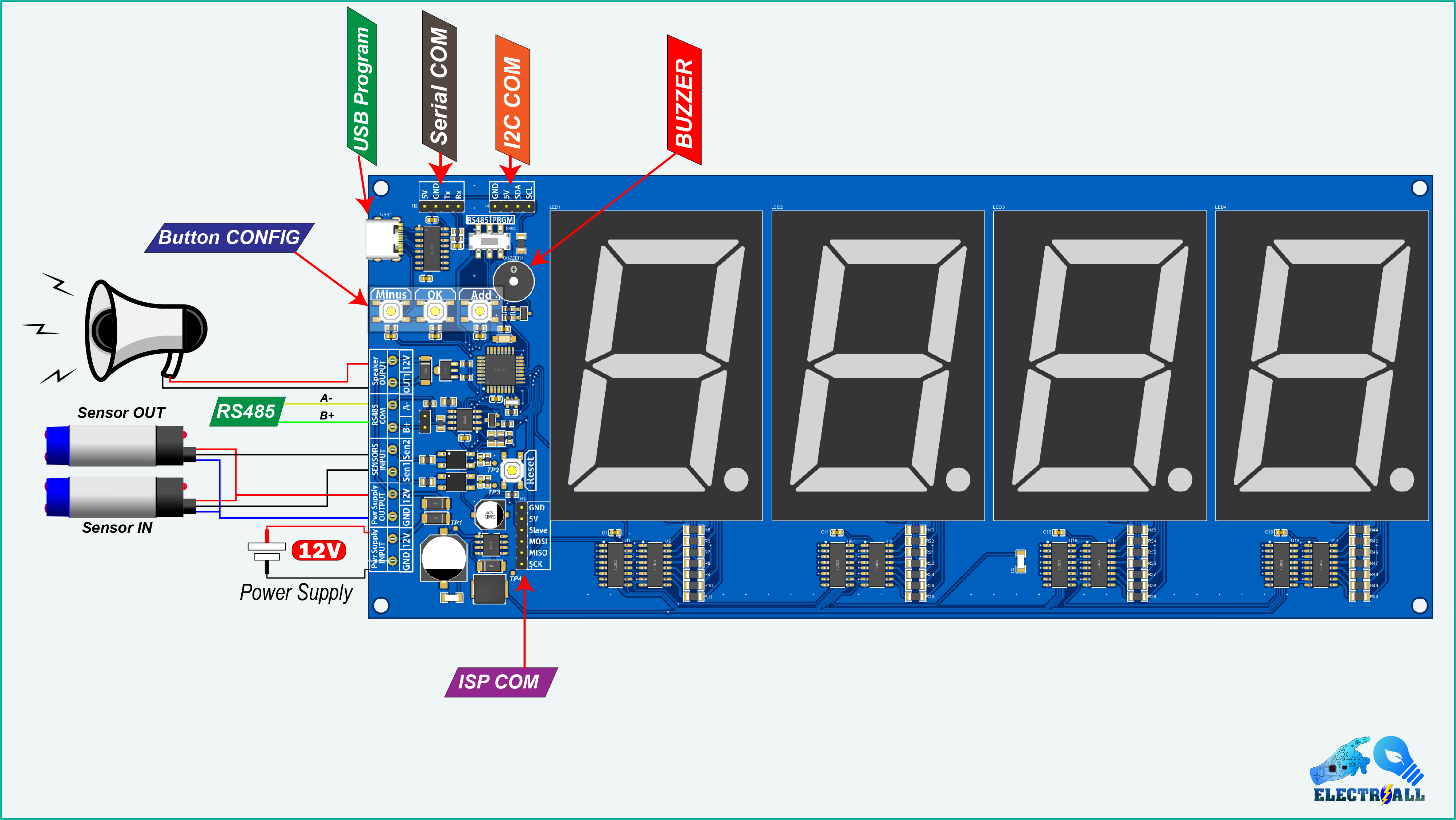
Aquí tenemos un contador de 4 dígitos y aquí están los sensores y a medida que van ingresando las personas el conteo se incrementa y cuando salen el conteo va decrementando. Y lo genial de este proyecto es que puedes ajustar el aforo. Además tiene la comunicación rs485 para integrar a cualquier sistema que tiene esa comunicación, por si fuera poco también cuenta con una sirena que suena cuando pasa el límite de aforo.
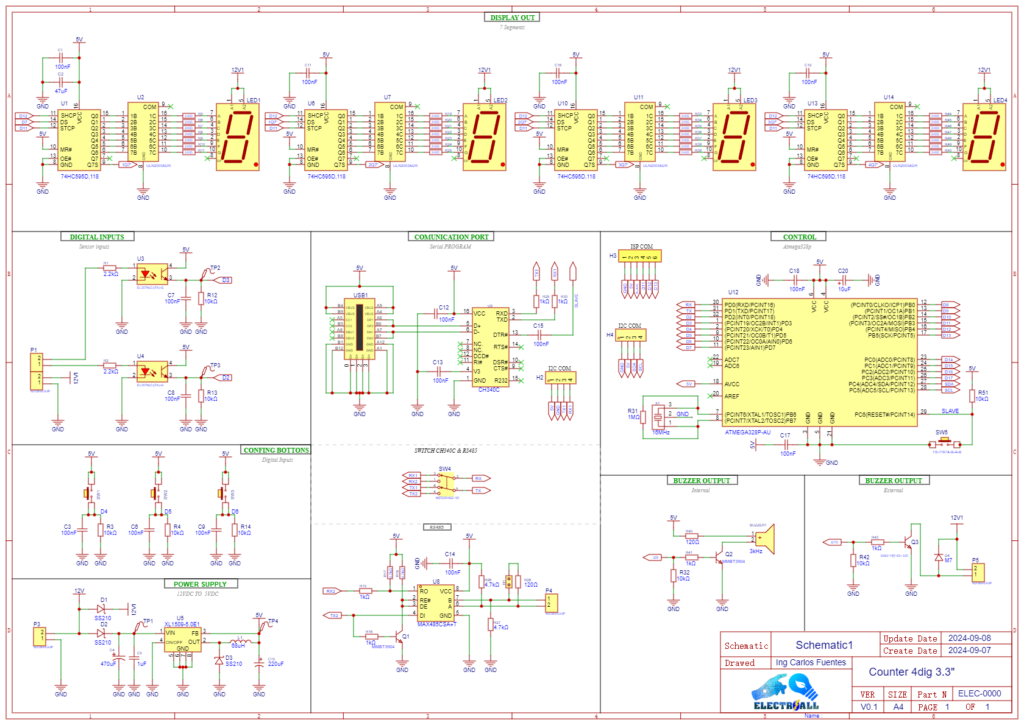
| Quantity | Comment | Designator | Footprint | Value | Manufacturer Part | Manufacturer | Supplier Part | Supplier |
| 1 | 3kHz | BUZZER1 | BUZ-TH_BD9.0-P5.00-D0.6-FD | 3kHz | HNB09A03 | 华能 | C96102 | LCSC |
| 15 | 100nF | C1,C3,C6,C7,C8,C9,C11,C12, C13,C14,C15,C16,C17,C18,C19 |
C0603 | 100nF | CC0603KRX7R9BB104 | YAGEO(国巨) | C14663 | LCSC |
| 1 | 47uF | C2 | C1206 | 47uF | CL31A476MPHNNNE | SAMSUNG(三星) | C96123 | LCSC |
| 1 | 470uF | C4 | CAP-SMD_BD10.0-L10.3-W10.3-LS11.3-FD | 470uF | VT1V471M1010 | ROQANG(容强) | C310845 | LCSC |
| 1 | 1uF | C5 | C1206 | 1uF | CL31B105KBHNNNE | SAMSUNG(三星) | C1848 | LCSC |
| 1 | 220uF | C10 | CAP-SMD_BD6.3-L6.6-W6.6-LS7.2-R-RD | 220uF | RVE1C221M0607 | ROQANG(容强) | C99836 | LCSC |
| 1 | 10uF | C20 | CAP-SMD_L3.2-W1.6-RD-C7171 | 10uF | TAJA106K016RNJ | Kyocera AVX | C7171 | LCSC |
| 3 | SS210 | D1,D2,D3 | SMA_L4.3-W2.6-LS5.2-RD | SS210 | MDD | C14996 | LCSC | |
| 1 | M7 | D4 | SMA_L4.3-W2.6-LS5.2-RD | M7 | MDD | C95872 | LCSC | |
| 1 | PZ254V-11-02P | H1 | HDR-TH_2P-P2.54-V-M | PZ254V-11-02P | XFCN(兴飞) | C492401 | LCSC | |
| 2 | 2.54-1*4 | H2,H4 | HDR-TH_4P-P2.54-V-M-1 | 2.54-1*4 | ZHOURI(洲日) | C5116483 | LCSC | |
| 1 | 2.54-1x6P直针 | H3 | HDR-TH_6P-P2.54-V-M-1 | 2.54-1x6P直针 | BOOMELE(博穆精密) | C37208 | LCSC | |
| 1 | 68uH | L1 | IND-SMD_L7.1-W6.6-1 | 68uH | PSPMAA0605H-680M-IGF | PROD(谱罗德) | C2983094 | LCSC |
| 4 | SM412301N | LED1,LED2,LED3,LED4 | LED-SEG-TH_10P-L48.7-W69.7-P2.54-S60.20-BL | SM412301N | ARKLED(方舟) | C164872 | LCSC | |
| 5 | WJ128V-5.0-2P | P1,P2,P3,P4,P5 | CONN-TH_2P-P5.00_WJ128V-5.0-2P | WJ128V-5.0-2P | KANGNEX(康奈克斯电气) | C8269 | LCSC | |
| 2 | MMBT3904 | Q1,Q2 | SOT-23-3_L2.9-W1.3-P1.90-LS2.4-BR | MMBT3904 | CJ(江苏长电/长晶) | C20526 | LCSC | |
| 1 | D882 Y档160~320 | Q3 | SOT-89-3_L4.5-W2.5-P1.50-LS4.2-BR | D882 Y档160~320 | CJ(江苏长电/长晶) | C9634 | LCSC | |
| 2 | 2.2kΩ | R1,R2 | R0805 | 2.2kΩ | 0805W8F2201T5E | UNI-ROYAL(厚声) | C17520 | LCSC |
| 8 | 10kΩ | R3,R4,R12,R13,R14,R32,R42,R51 | R0603 | 10kΩ | 0603WAF1002T5E | UNI-ROYAL(厚声) | C25804 | LCSC |
| 28 | 240Ω | R5,R6,R7,R8,R9,R10,R11,R19,R20, R21,R22,R23,R24,R25,R33,R34, R35,R36,R37,R38,R39,R44,R45, R46,R47,R48,R49,R50 |
R1206 | 240Ω | 1206W4F2400T5E | UNI-ROYAL(厚声) | C17961 | LCSC |
| 6 | 1kΩ | R15,R16,R29,R30,R41,R43 | R0603 | 1kΩ | 0603WAF1001T5E | UNI-ROYAL(厚声) | C21190 | LCSC |
| 4 | 4.7kΩ | R17,R18,R26,R27 | R0805 | 4.7kΩ | 0805W8F4701T5E | UNI-ROYAL(厚声) | C17673 | LCSC |
| 1 | 120Ω | R28 | R0603 | 120Ω | 0603WAF1200T5E | UNI-ROYAL(厚声) | C22787 | LCSC |
| 1 | 1MΩ | R31 | R0603 | 1MΩ | 0603WAF1004T5E | UNI-ROYAL(厚声) | C22935 | LCSC |
| 1 | 120Ω | R40 | R1206 | 120Ω | 1206W4F1200T5E | UNI-ROYAL(厚声) | C17909 | LCSC |
| 4 | TS-1187A-B-A-B | SW1,SW2,SW3,SW5 | SW-SMD_4P-L5.1-W5.1-P3.70-LS6.5-TL-2 | TS-1187A-B-A-B | XKB Connectivity(中国星坤) | C318884 | LCSC | |
| 1 | MST22D18G2 125 | SW4 | SW-SMD_MST22D18G2 | MST22D18G2 125 | SHOU HAN(首韩) | C2906280 | LCSC | |
| 4 | Test-Point | TP1,TP2,TP3,TP4 | Test-Point-0.5mm | |||||
| 4 | 74HC595D,118 | U1,U6,U10,U13 | SOIC-16_L9.9-W3.9-P1.27-LS6.0-BL | 74HC595D,118 | Nexperia(安世) | C5947 | LCSC | |
| 4 | ULN2003ADR | U2,U7,U11,U14 | SOIC-16_L9.9-W3.9-P1.27-LS6.0-BL | ULN2003ADR | TI(德州仪器) | C7512 | LCSC | |
| 2 | EL357N(C)(TA)-G | U3,U4 | OPTO-SMD-4_L4.4-W4.1-P2.54-LS7.0-TL | EL357N(C)(TA)-G | EVERLIGHT(亿光) | C29981 | LCSC | |
| 1 | XL1509-5.0E1 | U5 | SOIC-8_L5.0-W4.0-P1.27-LS6.0-BL | XL1509-5.0E1 | XLSEMI(芯龙) | C61063 | LCSC | |
| 1 | MAX485CSA+T | U8 | SOIC-8_L4.9-W3.9-P1.27-LS6.0-BL | MAX485CSA+T | ADI(亚德诺)/MAXIM(美信) | C9945 | LCSC | |
| 1 | CH340C | U9 | SOP-16_L10.0-W3.9-P1.27-LS6.0-BL | CH340C | WCH(南京沁恒) | C84681 | LCSC | |
| 1 | ATMEGA328P-AU | U12 | TQFP-32_L7.0-W7.0-P0.80-LS9.0-BL | ATMEGA328P-AU | MICROCHIP(美国微芯) | C14877 | LCSC | |
| 1 | USB-TYPE-C-018 | USB1 | USB-C_SMD-TYPE-C-31-M-12 | USB-TYPE-C-018 | DEALON(德艺隆) | C2927038 | LCSC | |
| 1 | 16MHz | X1 | OSC-SMD_3P-L3.2-W1.3-P0.95-L | 16MHz | CSTCE16M0V53-R0 | muRata(村田) | C32180 | LCSC |
Primero subimos este código BOOTLOADER a un arduino UNO como normalmente subimos cualquier programa a nuestra placa arduino UNO.
Despues de haber subido el programa anterior, ahora vamos aquemar el gestor de arranque al nuevo microcontrolador que tiene nuestro plc.
Recuerden que para poder usar un microcontrolador nuevo (atmega328P-AU), es necesario subir un gestor de arranque como también llamado “BOOTLOADER”, esto nos facilitará subir programas en futuras ocasiones. Especialmente cuando se quiere programar desde el IDE de arduino.
finalmente para quemar el bootloader se tendrá que realizar a través de los pines ISP, que prácticamente serían los pines [(MOSI=PIN 11) (MISO = PIN 12) (SCK=PIN 13) (Slave=PIN 10)]. Para subir y quemar el gestor de arranque necesitaremos un arduino UNO ó MEGA y realizar las siguientes conexiones (ARDUINO UNO – Contador). OJO que este paso solo se hace una sola vez.
#include <EEPROM.h>
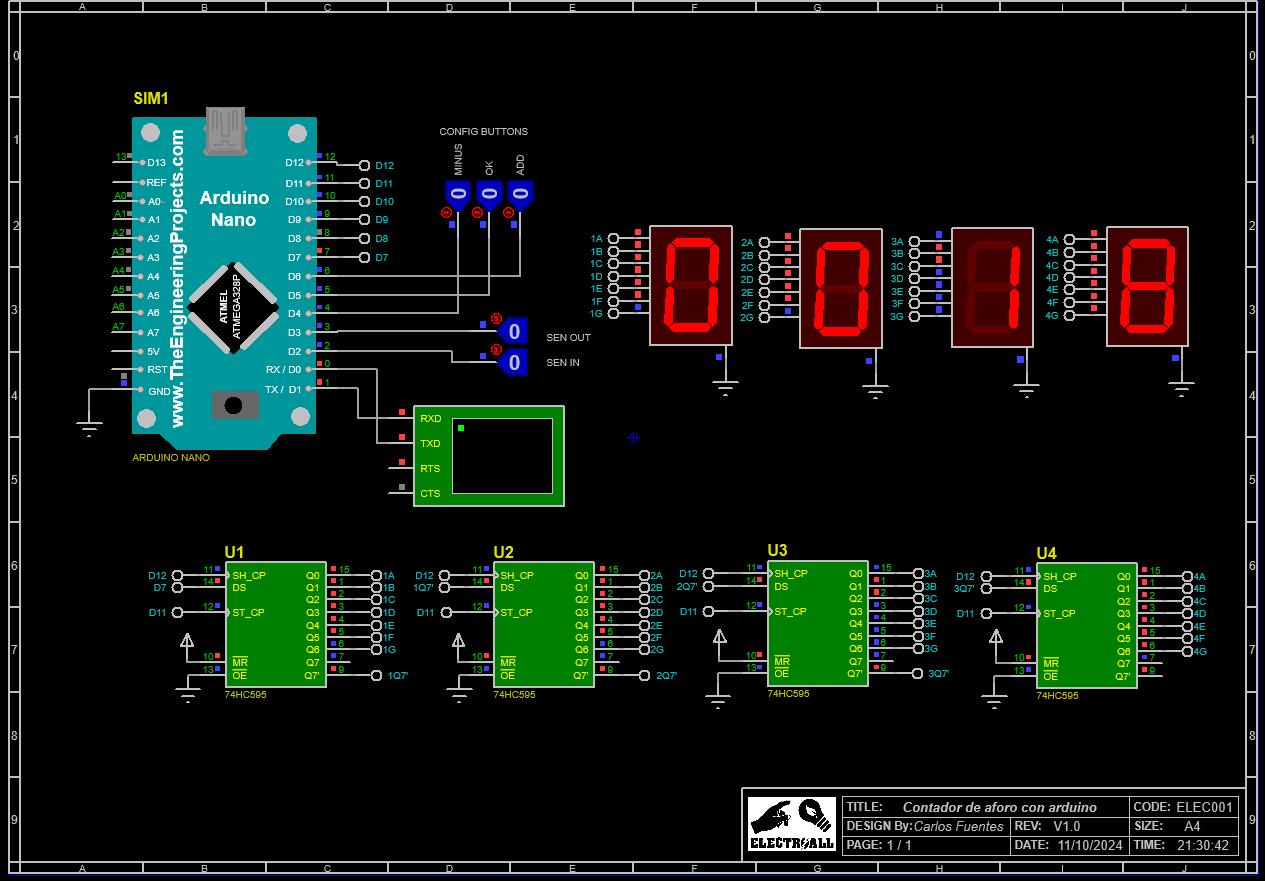
int clockpin = 12; //Cuando ay que leer los bit SH
int data = 7; //Envio datos DS
int latch = 11; //indica pin de salida en el chip ST
// no cambiar el const int
const int senIN = 2; // pin 2 como entrada para el sensor de entrada de personas
const int senOUT = 3; // pin 3 como entrada para el sensor de salida de personas
const int minus = 4; // para descontar la capacidad
const int ok = 5;
const int add = 6;
int last_ok = 0;
byte stateOk = 0;
bool stateConfigAforo = false;
int last_state_senIN = 0; // estado del pulsado anterior
int last_state_senOUT = 0; // estado del pulsado anterior
unsigned int contador = 0;
bool stateIN = false;
bool stateOUT = false;
int aforo = 50;
int direc_aforo = 0;
const int buzzer = 9;
const int sir = 10;
byte contadorDisplay[4] = { 0, 0, 0, 0 };
const int NUM[] = {
63, //Numero 0 en binario es : 00111111
6, //Numero 1 en binario es : 00000110
91, //Numero 2 en binario es : 01011011
79, //Numero 3 en binario es : 01001111
102, //Numero 4 en binario es : 01100110
109, //Numero 5 en binario es : 01101101
125, //Numero 6 en binario es : 01111101
7, //Numero 7 en binario es : 00000111
127, //Numero 8 en binario es : 01111111
111, //Numero 9 en binario es : 01101111
63, //Numero 0 en binario es : 00111111
64, //Numero 0 en binario es : 01000000
0, //Numero 0 en binario es : 00000000
};
void setup() {
Serial.begin(9600);
pinMode(latch, OUTPUT);
pinMode(clockpin, OUTPUT);
pinMode(data, OUTPUT);
pinMode(buzzer, OUTPUT);
pinMode(sir, OUTPUT);
pinMode(senIN, INPUT);
pinMode(senOUT, INPUT);
pinMode(minus, INPUT);
pinMode(ok, INPUT);
pinMode(add, INPUT);
EEPROM.get(direc_aforo, aforo);
}
void loop() {
//Serial.println(aforo);
if (digitalRead(ok) != last_ok) {
if (digitalRead(ok) == LOW) {
stateOk++;
delay(250);
}
}
last_ok = digitalRead(ok);
switch (stateOk) {
case 1:
stateConfigAforo = true;
break;
case 2:
stateConfigAforo = false;
stateOk = 0;
break;
}
if (stateConfigAforo == false) {
if (digitalRead(senIN) != last_state_senIN) {
if (digitalRead(senIN) == LOW) {
if (stateOUT == true) {
if (contador > 0) { contador--; }
stateOUT = false;
} else stateIN = true;
}
}
last_state_senIN = digitalRead(senIN);
if (digitalRead(senOUT) != last_state_senOUT) {
if (digitalRead(senOUT) == LOW) {
if (stateIN == true) {
if (contador < 9999) { contador++; }
stateIN = false;
} else stateOUT = true;
}
}
last_state_senOUT = digitalRead(senOUT);
if (contador >= aforo) {
tone(buzzer, 5000); // Pin 9, frecuencia
digitalWrite(sir, 1);
} else {
noTone(buzzer);
digitalWrite(sir, 0);
}
convert();
}
if (stateConfigAforo == true) {
configAforo();
noTone(buzzer);
digitalWrite(sir, 0);
}
}
void configAforo() {
if (digitalRead(add) == 1) {
if (aforo < 9999) {
aforo++;
}
delay(150);
} else if (digitalRead(minus) == 1) {
if (aforo > 0) {
aforo--;
}
delay(150);
}
EEPROM.put(direc_aforo, aforo);
convert();
}
void convert() {
if (stateConfigAforo == false) {
contadorDisplay[0] = contador % 10; //unidades
contadorDisplay[1] = (contador / 10) % 10; //decenas
contadorDisplay[2] = (contador / 100) % 10; //centenas
contadorDisplay[3] = (contador / 1000); //millar
}
if (stateConfigAforo == true) {
contadorDisplay[0] = aforo % 10; //unidades
contadorDisplay[1] = (aforo / 10) % 10; //decenas
contadorDisplay[2] = (aforo / 100) % 10; //centenas
contadorDisplay[3] = (aforo / 1000); //millar
}
cont();
}
void cont() {
digitalWrite(latch, LOW);
shiftOut(data, clockpin, MSBFIRST, NUM[contadorDisplay[0]]); //und
shiftOut(data, clockpin, MSBFIRST, NUM[contadorDisplay[1]]); // dec
shiftOut(data, clockpin, MSBFIRST, NUM[contadorDisplay[2]]); //und
shiftOut(data, clockpin, MSBFIRST, NUM[contadorDisplay[3]]); // dec
digitalWrite(latch, HIGH);
}